1 - 环境搭建与代码移植
课程定位: 5天IoT实训 · 第一天
主题: 重新上手 STM32F407 · 工程模板 · 寄存器/库函数点灯 · SysTick 延时
目标硬件: STM32F407ZET6 开发板(LED1 → PG14,LED2 → PG13,LED3 → PG6)
一、开发环境安装
1.1 安装 Keil5 MDK
安装步骤:
- 下载 MDK-ARM v5.x 安装包(官网或课程资料包)
- 以管理员身份运行安装程序,路径不要有中文或空格
- 安装完成后打开 Keil,菜单
File → License Management激活
本课程统一使用 Keil MDK v5.36+,编译器选 ARM Compiler 5(AC5)。
1.2 安装 STM32F4 芯片支持包
方法一:在线安装(需要网络)
- 打开 Keil →
Pack Installer - 在 Device 栏搜索
STM32F407 - 找到
Keil::STM32F4xx_DFP,点击 Install
方法二:离线安装(推荐,速度快)
# 双击 .pack 文件直接安装,或从命令行:
# 将 .pack 文件放到 Keil 安装目录的 Packs 文件夹后重启即可
1.3 认识 .s 启动文件
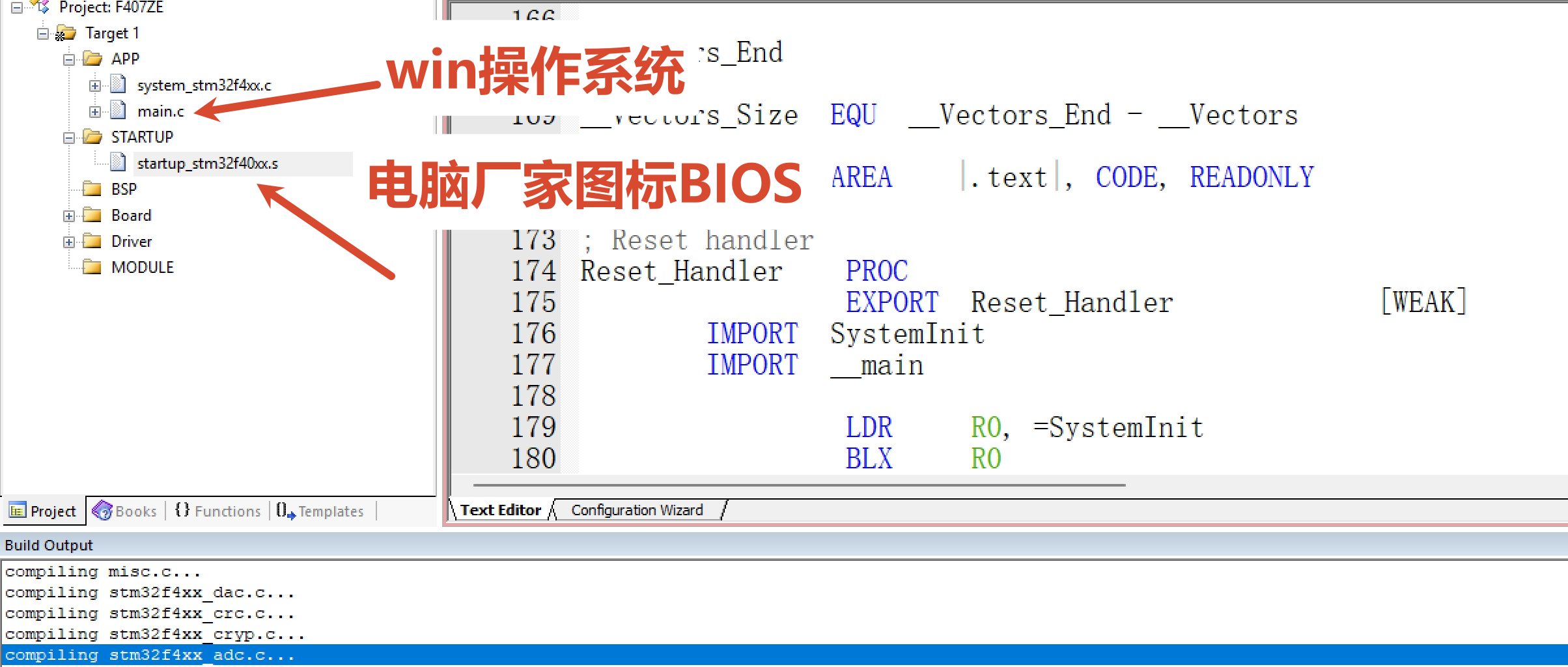
STM32 上电后第一个执行的不是 main(),而是汇编启动文件 startup_stm32f40_41xxx.s:
| 启动文件完成的工作 | 说明 |
|---|---|
| 初始化堆栈指针 SP | 指向 RAM 末尾 |
| 复制 .data 段到 RAM | 初始化全局变量 |
| 清零 .bss 段 | 未初始化全局变量赋 0 |
调用 SystemInit() | 配置系统时钟 |
跳转到 main() | 开始执行用户代码 |
二、工程模板结构
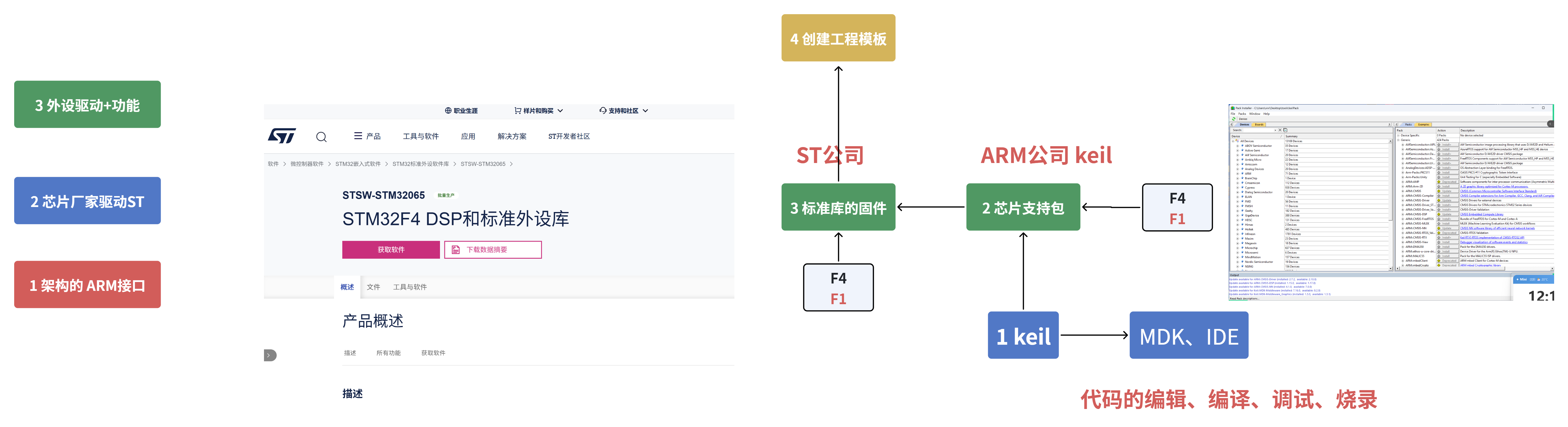
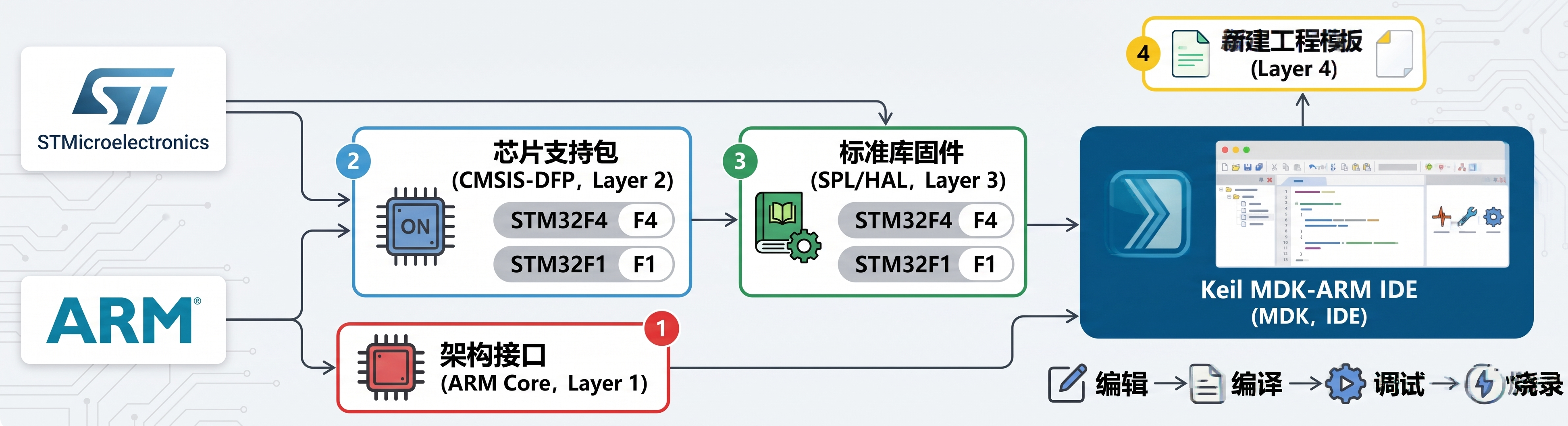
本课程统一使用三层分层架构:
STM32F407_ProjectTemplate/
├── app/
│ └── main.c ← 应用层:业务逻辑
├── board/
│ └── board.c ← 板级初始化:SysTick 延时
├── bsp/
│ └── uart/
│ ├── bsp_uart.c ← 串口驱动(UART1)
│ └── bsp_uart.h
├── module/
│ └── stm32f4xx_it.c ← 中断服务函数
├── libraries/
│ ├── CMSIS/ ← ARM 内核头文件
│ └── STM32F4xx_StdPeriph_Driver/ ← ST 标准外设库
└── project/MDK(V5)/ ← Keil 工程文件 (.uvprojx)
- app层 只调用 BSP 接口,不直接操作寄存器
- bsp层 封装具体硬件,换板子只改这里
- libraries层 不修改,保持原厂代码
三、GPIO 点灯
3.1 方式1:寄存器直接操作
目标: 点亮 LED1(PG14,低电平亮)
步骤拆解
/* 1. 开启 GPIOG 时钟 —— AHB1ENR 第 6 位置 1 */
RCC->AHB1ENR |= (0x01 << 6);
/* 2. 配置 PG14 为输出模式 —— MODER[29:28] = 01 */
GPIOG->MODER &= ~(0x03 << (14 * 2)); // 先清零(防脏数据)
GPIOG->MODER |= (0x01 << (14 * 2)); // 写入输出模式
/* 3. 配置输出速度为最高速 —— OSPEEDR[29:28] = 11 */
GPIOG->OSPEEDR |= (0x03 << (14 * 2));
/* 4. 无上下拉 —— PUPDR[29:28] = 00 */
GPIOG->PUPDR &= ~(0x03 << (14 * 2));
/* 5. ODR 输出低电平 → LED 亮 */
GPIOG->ODR &= ~(0x01 << 14);
寄存器速查
| 寄存器 | 作用 | 地址偏移 |
|---|---|---|
AHB1ENR | 外设时钟使能 | 0x30 |
MODER | 引脚模式(输入/输出/AF/模拟) | 0x00 |
OSPEEDR | 输出速度 | 0x08 |
PUPDR | 上下拉 | 0x0C |
ODR | 输出数据(直接写) | 0x14 |
BSRR | 置位/复位(原子操作) | 0x18 |
&= ~ 再 |=?每个引脚占 MODER 中 2 位。直接 |= 会把原有的位叠加进去(例如本来是 10 模拟模式,你只想设 01 输出,直接 |= 变成 11,实际是 AF 模式)。必须先清零对应位,再写入目标值。
3.2 方式2:标准外设库函数
目标: 点亮 LED2(PG13)
#include "board.h"
int main(void)
{
board_init(); // 初始化系统(SysTick 等)
GPIO_InitTypeDef GPIO_InitStructure;
/* 1. 使能 GPIOG 时钟 */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG, ENABLE);
/* 2. 配置引脚参数 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; // 输出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; // 推挽
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
/* 3. 初始化 */
GPIO_Init(GPIOG, &GPIO_InitStructure);
/* 4. 输出低电平 → LED 亮 */
GPIO_ResetBits(GPIOG, GPIO_Pin_13);
while (1) {}
}
库函数对比寄存器操作
| 操作 | 寄存器写法 | 库函数写法 |
|---|---|---|
| 开时钟 | RCC->AHB1ENR |= (1<<6) | RCC_AHB1PeriphClockCmd(GPIOG, ENABLE) |
| 输出低 | GPIOG->ODR &= ~(1<<13) | GPIO_ResetBits(GPIOG, GPIO_Pin_13) |
| 输出高 | GPIOG->ODR |= (1<<13) | GPIO_SetBits(GPIOG, GPIO_Pin_13) |
| 翻转 | GPIOG->ODR ^= (1<<13) | GPIO_ToggleBits(GPIOG, GPIO_Pin_13) |
优点: 可读性好,移植方便,不容易出错
缺点: 代码体积稍大,执行效率略低
本课程选择: 驱动层使用库函数,追求极致性能的场合再看寄存器
四、SysTick 延时函数
4.1 SysTick 是什么
SysTick 是 Cortex-M4 内核自带的 24 位递减计数器,每个系统时钟周期减 1,减到 0 时产生中断(或轮询检测)。STM32F407 默认主频 168 MHz,1 个时钟周期 = 约 5.95 ns。
4.2 初始化(board_init)
void board_init(void)
{
// 中断向量表定位到 Flash 起始
SCB->VTOR = (0x08000000 & 0x3FFFFF80);
// SysTick 时钟源选系统时钟(168 MHz)
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);
// 重装值设为最大(0xFFFF),先让它跑起来
SysTick->LOAD = 0xFFFF;
// 使能 SysTick,开始计数
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;
}
4.3 微秒延时实现
void delay_us(uint32_t _us)
{
uint32_t ticks = _us * (SystemCoreClock / 1000000); // 需要等待的节拍数
uint32_t told = SysTick->VAL; // 记录起始计数值
uint32_t tcnt = 0;
while (1)
{
uint32_t tnow = SysTick->VAL;
if (tnow != told)
{
// 计数器递减,tnow < told 是正常情况
// tnow > told 说明发生了一次溢出回绕
tcnt += (tnow < told) ? (told - tnow)
: (SysTick->LOAD - tnow + told);
told = tnow;
if (tcnt >= ticks) break;
}
}
}
void delay_ms(uint32_t _ms) { delay_us(_ms * 1000); }
要点: 使用"差值累加"而不是"固定计时",正确处理了计数器溢出回绕的情况。
4.4 LED 闪烁实验
目标: LED3(PG6)每隔 1 秒翻转一次
int main(void)
{
board_init();
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOG, &GPIO_InitStructure);
while (1)
{
GPIO_SetBits(GPIOG, GPIO_Pin_6); // 灭
delay_ms(1000);
GPIO_ResetBits(GPIOG, GPIO_Pin_6); // 亮
delay_ms(1000);
}
}
五、UART1和printf重定向
5.1 UART1 引脚
| 信号 | 引脚 | 说明 |
|---|---|---|
| TX | PA9 | 发送,需配置为复用推挽(AF7) |
| RX | PA10 | 接收,配置为复用模式 |
5.2 初始化代码
void uart1_init(uint32_t baud)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* 1. 开启时钟 */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
/* 2. IO 复用为 USART1(AF7) */
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
/* 3. 配置 PA9 TX */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 4. 配置 PA10 RX(同上) */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 5. USART1 参数 */
USART_InitStructure.USART_BaudRate = baud;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_Init(USART1, &USART_InitStructure);
/* 6. 使能接收中断 */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE);
/* 7. NVIC:中断优先级 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
5.3 printf 重定向
通过重写 fputc 函数,将 printf 的输出绑定到 USART1:
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t)ch);
// 等待发送完成
while (RESET == USART_GetFlagStatus(USART1, USART_FLAG_TXE)) {}
return ch;
}
使用前提: Keil 工程 Options → Target → 勾选 Use MicroLIB(否则需要额外配置
__FILE结构体)
六、课后验收标准
| 验收项 | 判断方式 | 目标 |
|---|---|---|
| 编译下载 | Keil 0 错误 0 警告 | ✅ |
| 寄存器点灯 | LED1(PG14)常亮 | ✅ |
| 库函数点灯 | LED2(PG13)常亮 | ✅ |
| SysTick 闪烁 | LED3(PG6)每秒闪一次 | ✅ |
| printf 输出 | 串口助手(115200)收到开机打印 | ✅ |
七、常见问题
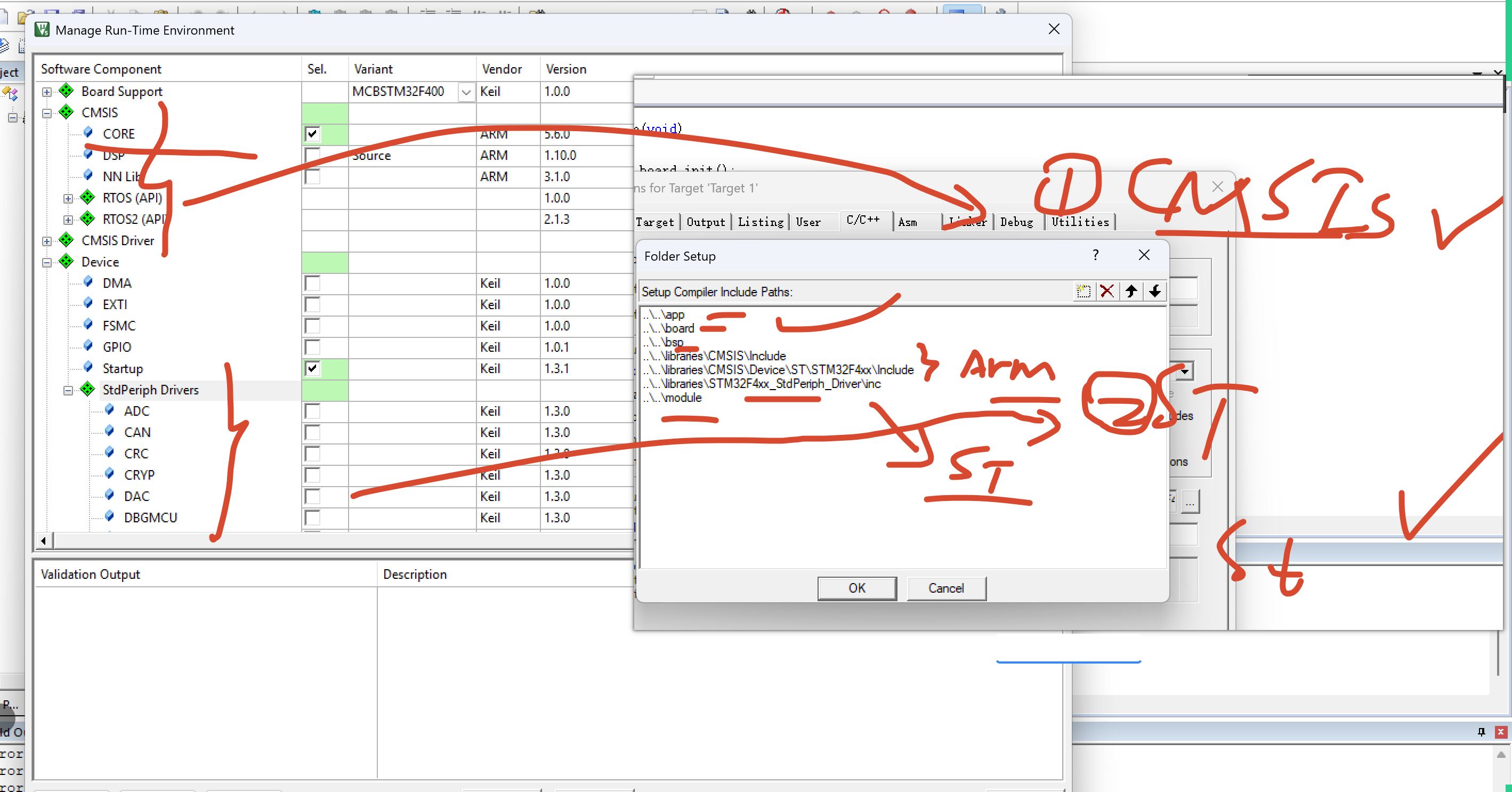
Q: 编译提示 cannot open source file "stm32f4xx.h"?
A: 芯片支持包未安装,或 Keil 工程 Include Path 未包含 libraries/CMSIS/Include 和标准库头文件路径。
Q: 下载后 LED 不亮,但编译没报错?
A: 检查以下几点:① J-Link/ST-Link 驱动是否安装;② Keil Flash Download 选项是否选对芯片;③ LED 正负极方向(本板低电平亮);④ 是否忘记调用 board_init()。
Q: delay_ms(1000) 实际只延时了几毫秒?
A: SystemCoreClock 获取的频率不对,检查 system_stm32f4xx.c 中的 PLL 配置是否与实际晶振匹配(外部晶振通常 8 MHz 或 25 MHz)。
Q: printf 没有输出?
A: ① 检查是否勾选了 MicroLIB;② 串口助手波特率是否为 115200;③ USB-TTL 线 TX/RX 是否交叉连接(板 TX → 模块 RX)。
八、课程代码索引
本课程配套代码位于 STM32F407ZE代码/ 目录,共 15 个递进式实验工程 + 预编译烧录文件,按难度顺序排列。
8.1 工程总览
| 编号 | 工程名称 | 核心知识点 | 关键源文件 |
|---|---|---|---|
| 001 | 寄存器点灯 | 直接操作 RCC/GPIO 寄存器,位操作置位/清位 | app/main.c |
| 002 | 库函数点灯 | 标准外设库 GPIO_Init + GPIO_SetBits | app/main.c |
| 003 | 滴答定时器灯闪烁 | SysTick 差值累加延时,溢出回绕处理 | board/board.c |
| 004 | 位带操作 | Cortex-M4 位带别名区,单比特原子读写 | app/main.c |
| 005 | 串口打印信息 | UART1 初始化 + fputc printf 重定向 | bsp/uart/bsp_uart.c |
| 006 | 按键点灯 | GPIO 输入轮询 + 软件消抖 | app/main.c |
| 007 | 外部中断按键点灯 | EXTI 外部中断配置,NVIC 优先级分组 | app/main.c |
| 008 | 定时器灯闪烁 | TIM 基本定时器中断,ARR/PSC 计算 | app/main.c |
| 009 | PWM 呼吸灯 | TIM 输出比较 PWM 模式,占空比渐变 | app/main.c |
| 010 | 串口中断DMA接收二合一 | UART 中断 + DMA 接收不定长数据帧 | bsp/uart/bsp_uart.c |
| 011 | ADC 采集 | ADC1 规则通道单次转换,DMA 搬运结果 | app/main.c |
| 012 | 软件I2C (SHT20) | GPIO 模拟 I2C 时序,读取温湿度传感器 | bsp/bsp_sht20.c |
| 013 | 软件SPI (Flash) | GPIO 模拟 SPI 四线时序,W25Q128 读写 | bsp/flash/spi_flash.c |
| 014 | 硬件SPI (Flash) | SPI 外设硬件加速,DMA 提升吞吐 | bsp/flash/spi_flash.c |
| 015 | RTC 时钟实验 | RTC 掉电保持(VBAT),日期时间读写 | bsp/rtc/rtc.c |
8.2 工程结构(统一模板)
所有工程均采用相同的三层分层架构:
STM32F407ZE代码/
├── 001寄存器点灯/
│ └── STM32F407_ProjectTemplate/
│ ├── app/
│ │ └── main.c ← 应用层业务逻辑
│ ├── board/
│ │ ├── board.c ← SysTick 延时、系统初始化
│ │ └── board.h
│ ├── bsp/
│ │ └── uart/
│ │ ├── bsp_uart.c ← 串口驱动(printf 重定向)
│ │ └── bsp_uart.h
│ ├── module/
│ │ ├── stm32f4xx_conf.h ← 外设库使能配置
│ │ └── stm32f4xx_it.c ← 中断服务函数
│ └── libraries/ ← ST 标准外设库(不修改)
│
├── 012软件I2C(SHT20)/ ← 新增 bsp_sht20.c/h
├── 013软件SPI(flash)/ ← 新增 bsp/flash/spi_flash.c/h
├── 014硬件SPI(flash)/ ← 新增 bsp/flash/spi_flash.c/h
├── 015RTC时钟实验(可做掉电实验)/ ← 新增 bsp/rtc/rtc.c/h
│
└── 测试/ ← 预编译 .hex,可直接烧录验证
├── 001寄存器点灯.hex
├── 002库函数点灯.hex
├── 003滴答定时器灯闪烁.hex
├── 004位带操作.hex
├── 005串口打印信息.hex
├── 006按键点灯.hex
├── 007外部中断按键点灯.hex
├── 008定时器灯闪烁.hex
├── 010串口中断DMA接收二合一.hex
├── 011ADC采集.hex
├── 012软件I2C(SHT20).hex
├── 013软件SPI(flash).hex
├── 014硬件SPI(flash).hex
└── 015RTC时钟实验(可做掉电实验).hex
8.3 Day 1 重点工程
与本天内容直接相关的工程:
| 工程 | 与 Day 1 的关联 |
|---|---|
| 001 寄存器点灯 | 对应第三章:直接操作 RCC/GPIO 寄存器控制 LED1(PG14) |
| 002 库函数点灯 | 对应第三章:使用标准外设库控制 LED2(PG13) |
| 003 滴答定时器灯闪烁 | 对应第四章:SysTick 延时 + LED3(PG6)每秒闪烁 |
| 005 串口打印信息 | 对应第五章:UART1 初始化 + printf 重定向 |
不想重新编译?直接用 测试/ 目录下的 .hex 文件通过 Keil Flash 或 ST-Link Utility 烧录即可,每个实验约 30 秒完成验证。

